
The Bernard&Anne Spitzer
School of Architecture
SSA Robotics Lab
DIY Robotic Arm
Jiajun Liu

Description
While the pandemic took away the access of the ABB robot in school, I decided to find a robotic arm that can be 3d printed and using Arduino to continue to get a hand on experience with the robotic arm.
It's a four-axis robotic arm that shares the kinematic linkage of the ABB IRB460 scaled-down with a ratio of 1:7.

All the material is available on amazon that can be started right away. I make a material list with approximate cost here in google sheet.
https://docs.google.com/spreadsheets/d/1Xl2ElEl-fe4WAZlTW5fgzCmNKa23Jy-7ip074lIAGwc/edit?usp=sharing
The assembly instruction of the robot is available here
https://www.instructables.com/id/EEZYbotARM-Mk2-3D-Printed-Robot/
Assembly Video. Part I
Assembly Video. Part II
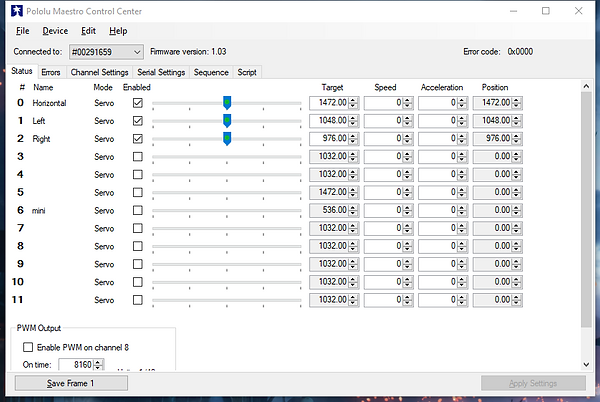
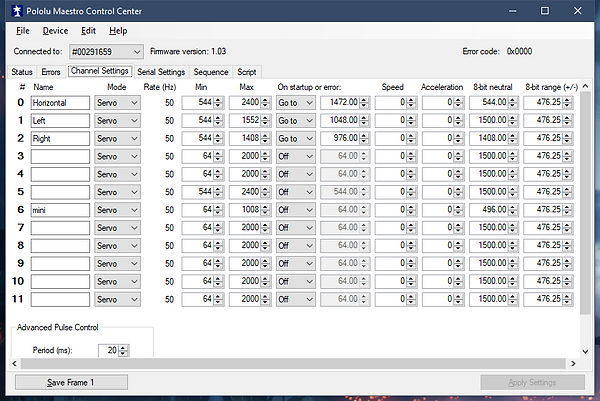
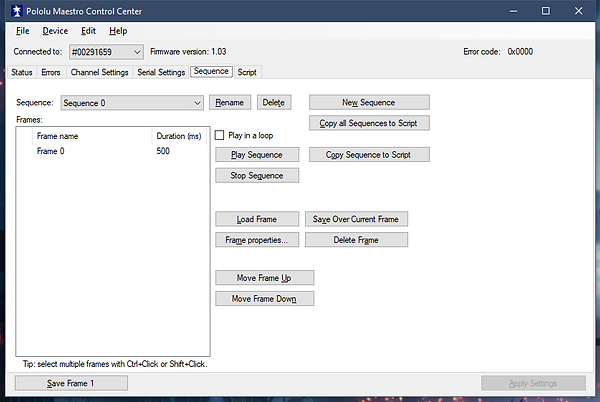
Servo Motor Control
After the assembly of the robot, each servo is plugin into a mini Maestro 12-Channel USB servo controller. It uses Mastetro scripting language with the command that can set servo targets, speeds, and accelerations, retrieve input values, and perform mathematical computations. The controller can record the servo position and play it in a sequence.
Camera Attachment
